Japońska „robotyczna piłeczka” badała Księżyc. Powstała z pomocą producenta zabawek [+WIDEO]
Mały robot potrafi sporo. Niewielki japoński robot księżycowy SORA-Q, który w styczniu 2024 roku trafił na powierzchnię Księżyca w ramach misji SLIM, ponownie zwrócił uwagę mediów po publikacji wyników jego pracy w czasopiśmie naukowym „Science Robotics”.
Robot, oficjalnie oznaczony jako Lunar Excursion Vehicle 2, czyli LEV-2, został opracowany przez japońską agencję kosmiczną JAXA wspólnie z firmą TOMY, Sony Group Corporation i Uniwersytetem Doshisha.
Szczególną uwagę przyciągnął udział producenta zabawek. Konstrukcja SORA-Q wykorzystuje rozwiązania związane z miniaturyzacją, prostymi mechanizmami transformacji i energooszczędnością, rozwijane wcześniej w technologiach konsumenckich. Robot był inspirowany rozwiązaniami znanymi z zabawek typu Transformers.
Według JAXA prace nad projektem prowadzone wspólnie z firmą TOMY rozpoczęły się w 2016 roku. Sony dołączyło do nich w 2019 roku, a Uniwersytet Doshisha w 2021 roku.
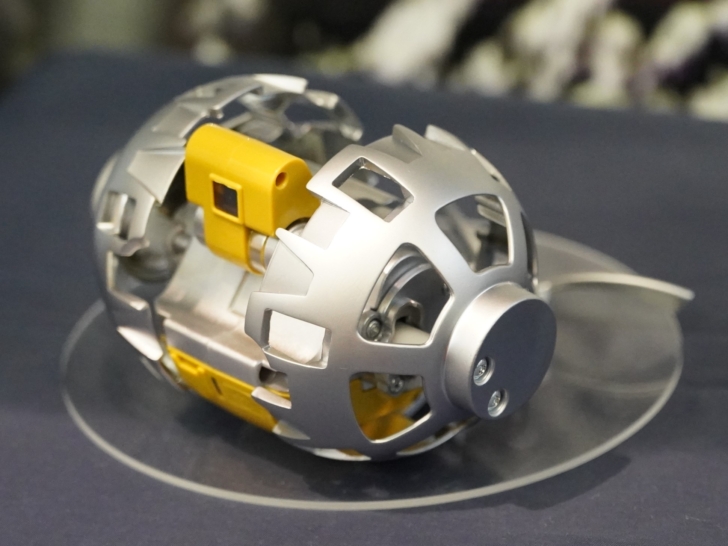
SORA-Q miał postać niewielkiej kuli o średnicy około 8 cm i masie około 228 gramów. Po znalezieniu się na powierzchni Księżyca robot rozłożył półkoliste koła, stabilizujący ogon oraz kamery. Dzięki temu z kulistego obiektu zmienił się w dwukołowy pojazd zdolny do poruszania się po księżycowym regolicie.
Robot trafił na Księżyc razem z japońskim lądownikiem SLIM, który wystartował 7 września 2023 roku i wylądował na powierzchni Srebrnego Globu w styczniu 2024 roku. LEV-2 został wypuszczony tuż przed lądowaniem głównego aparatu. Następnie wykonał zdjęcia lądownika SLIM oraz jego otoczenia, a dane przesłał na Ziemię za pośrednictwem drugiego małego robota, LEV-1.
Zdjęcia miały znaczenie nie tylko dokumentacyjne. SLIM po lądowaniu miał problem z wytwarzaniem energii, ponieważ jego panele słoneczne nie były ustawione w sposób umożliwiający natychmiastowe ładowanie. Fotografia wykonana przez SORA-Q pomogła ustalić, że lądownik znalazł się na powierzchni Księżyca w nieprawidłowej pozycji. Według późniejszych ustaleń JAXA przyczyną problemu była utrata ciągu jednego z silników podczas końcowej fazy lądowania.
Japońska agencja podała, że fotografia wykonana przez SORA-Q potwierdziła kilka kluczowych elementów misji: transformację robota z zamkniętej kuli w konfigurację jezdną, ruch po powierzchni Księżyca, wykonanie zdjęć, autonomiczny wybór obrazu pokazującego lądownik i jego otoczenie oraz bezprzewodową transmisję danych między LEV-2 i LEV-1.
Według JAXA SORA-Q był najmniejszym i najlżejszym łazikiem księżycowym, a także pierwszym łazikiem, który przeprowadził w pełni autonomiczną eksplorację powierzchni Księżyca. Agencja wskazywała również, że LEV-1 i LEV-2 jako pierwsze wykonały zsynchronizowaną i skoordynowaną eksplorację księżycową.
Znaczenie tej historii wykracza poza samą ciekawostkę o „zabawce” na Księżycu. SORA-Q pokazał, że niewielkie, tanie i wyspecjalizowane roboty mogą wykonywać realne zadania badawcze w miejscu, do którego trudno wysłać większe pojazdy. Zamiast jednego dużego łazika przyszłe misje mogą wykorzystywać grupy małych maszyn, zdolnych do docierania w trudniejszy teren, pracy zespołowej i przekazywania danych przez inne urządzenia.
W opublikowanej w czerwcu pracy zespół badaczy opisał SORA-Q jako transformowalny, dwukołowy łazik centymetrowej skali, który z kompaktowej formy kulistej przechodzi w konfigurację umożliwiającą jazdę po miękkim, sypkim podłożu. Krótka misja robota pokazała, że nawet urządzenie mieszczące się w dłoni może dostarczyć danych ważnych dla oceny lądowania i dla projektowania kolejnych misji księżycowych.
Kresy.pl / Science Robotics / Space.com